Learning Effectively from Intervention for Visual-based Autonomous Driving
{kind=link}
Abstract
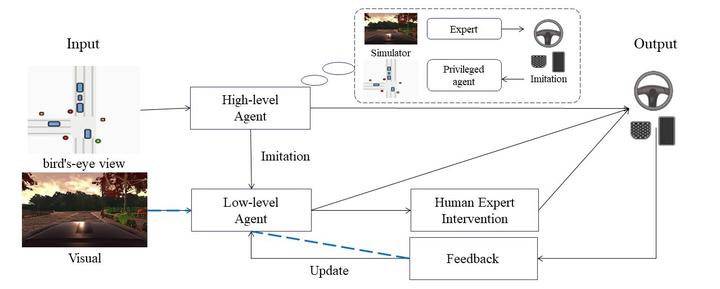
In this paper, we propose a hierarchical training architecture and an interactive transferring method to achieve fast model training and fast model deploying in real car. For the training architecture, we train the high-level privileged agent with the ground-truth data of the environment. The trained policy is then executed to train a purely vision-based low-level agent. The expert intervenes during the training process of the low-level agent and provides feedback in action-space. Such intervention provides significant information that can be learned effectively. With the policy trained in simulation, we use expert intervention to provide a limited amount of corrective feedback to generate new data. We also transfer trained policy to real physical car, we extend our hierarchical framework to a continuous learning framework. Considering the complexity of driving situations in the real world, the agent needs demonstrations for different real world driving conditions to be provided at once for acquiring diverse skills, which is much more challenging than in simulation.